Date de background
La 17 septembrie 1976 prototipul aparatului orbital al navetelor spaţiale americane (Orbital Vehicle OV-1 “Enterprise”1) a fost scos din hangarul de montaj al firmei Rockwell Int. de la Palmdale (California), iar în februarie 1977 a fost amplasat pe partea dorsală a unui aparat BOEING 747 (greutatea totală – 265 t, din care 195 t masa avionului purtător).
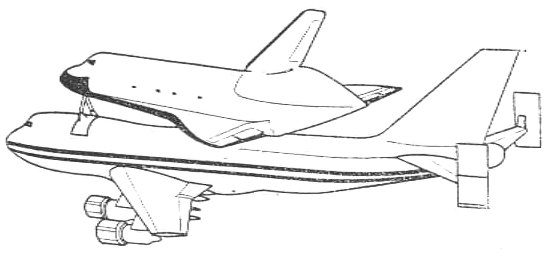
FIG. 1 Poziţia navetei spaţiale pe avionul purtător B 747 în cursul primelor încercări în zbor
Primele zboruri ale ansamblului BOEING – Enterprise (începute la 18 februarie 1977) au fost destinate verificării comportării ambelor aparate aerospaţiale în timpul zborului. În cadrul celor cinci zboruri “captiv-neactive”, în Orbiter nu au luat loc piloţi, deşi cabina a fost dotată cu scaune ejectabile; la zborurile efectuate în continuare, la bordul Enterprise au luat loc câte doi piloţi, mai întâi echipajul format din Fred Haise şi Charles Fullerton, care au realizat trei zboruri “captive”, sistemele navetei fiind acţionate în sensul doar al activării acestora.
Începând din iulie 1977 au urmat zboruri autonome planate ale aparatului orbital Enterprise, la bordul acestuia fiind piloţii Joe Engle şi Richard Truly, naveta fiind eliberată de pe pilonii avionului purtător la altitudini cuprinse între 5700 şi 7800 m. Zborurile respective au fost incluse în programul Testelor de apropiere şi de aterizare ale navetei (TAAN). Acest program a avut ca obiect cunoaşterea de către piloţi şi ingineri a modalităţilor de pilotare a aparatului orbital în timpul zborurilor la viteze mici şi la aterizare.
Naveta Enterprise nu a dispus de sistem propriu de propulsie, dar cele patru aterizări efectuate după planările corespunzătoare, pe pista de la Rogers Dry Lake au demonstrat că stimulările despre modul cum trebuie pilotată naveta la finele unei misiuni orbitale, au fost corecte şi foarte apropiate de realitate.
Cel de al cincilea test de apropiere şi aterizare a avut loc la 26 octombrie 1977, la comenzile Orbiterului fiind F. Haise şi G. Fullerton; naveta Enterprise s-a separat de avionul purtător la înălţimea de 13000 m, a efectuat o coborâre rapidă apoi a aterizat pe pista de beton de la AFB Edwards; cu ocazia acestui zbor s-a evidenţiat o problemă la sistemul de control a zborului navetei, care a făcut-o pe aceasta susceptibilă la aşa numitul fenomen al oscilaţiilor provocate de pilot (OPP), situaţie potenţial periculoasă în perioada aterizării care, după cum se cunoaşte nu poate fi ratată, Orbiterul nedispunând de mijloace de propulsie.
Acest aspect a determinat iniţierea unui program de cercetări a fenomenului OPP cu ajutorul unor alte aparate ale NASA, în principal cu avionul F-8C dotat cu sistem fly-by-wire digital (DFBW).
Scopul testărilor a fost ca, înaintarea primului zbor orbital al navetei spaţiale (12 aprilie 1981), să fie împiedicată eficient apariţia fenomenului OPP. Ultimul zbor al navetei Enterprise, fixată pe avionul Boeing 747 purtător, a avut loc la 18 noiembrie 1977, în primăvara anului următor naveta a fost transferată la Centrul de cercetări Marshall al NASA, pentru efectuarea unor simulări terestre – vibraţii verticale (în poziţie verticală), destinate să contribuie la verificarea structurii şi sistemelor navetei.
Stabilirea Orbiterului în perioada “approach”
În timpul efectuării zborului pasiv pe traiectoria de coborâre planată, momentele în jurul centrului de greutate al forţelor aerodinamice care acţionează asupra aparatului orbital al navetei, sunt într-un echilibru care determină coborârea cu pantă constantă. Modificarea acestui echilibru ca urmare a unor cauze externe, implică rotirea aparatului orbital în jurul unei axe şi părăsirea traiectoriei rectilinii de coborâre; cel mai adesea apar modificări în jurul axei de tangaj (y - y), destinate fie “cabrării” aparatului orbital (prin tragerea spre apoi a manşei), fie picajului acestuia (prin împingerea manşei către direcţia de deplasare). Se consideră că orice aparat de zbor este stabil dacă forţele aerodinamice suplimentare, care apar odată cu rotirea menţionată, provoacă momente care readuc aparatul de zbor la poziţia iniţială.
Din analiza stabilităţii longitudinale a planoarelor se cunoaşte că aceasta depinde de poziţia centrului de greutate al aparatului de zbor respectiv; dacă acest centru este situat în avalul centrului de presiune al aripii, atunci momentul de stabilizare produs de forţele aerodinamice care apar pe ampenaj nu mai pot echilibra momentul perturbator provocat de un eventual surplus de forţe aerodinamice care apar pe ampenaj nu mai pot echilibra momentul perturbator provocat de un eventual surplus de forţe aerodinamice de pe aripă şi, ca urmare, deviaţiile iniţial de valoarea redusă ale aparatului de zbor de la traiectorie, se amplifică şi chiar pot ajunge să iniţieze răsturnarea acestuia! Pentru efectuarea unor calcule, în cazul Orbiterului navetei, se menţionează că poziţia centrului de greutate al acestuia pe axa x-x este la 14782 mm, măsurată de la vârful fuselajului, iar unghiul de incidenţă curent la aterizarea Orbiterului este în jurul a 28o (la o viteză de cca. 380 km/oră).
Se reaminteşte şi faptul că, cu cât centrul de greutate al planorului este situat mai “în spate” – respectiv dincolo de 30% din coarda aripii faţă de bordul de atac al acesteia la încastrarea cu fuselajul, cu atât aparatul de zbor are tendinţa de a deveni instabil. Se cunoaşte că studiul în tunelul aerodinamic asupra machetei unui aparat de zbor conduce la trasarea, în funcţie de valorile unghiurilor de incidenţă, a unor curbe de moment de tangaj, având ca parametru variabil unghiurile de bracaj ale profundorului. În timp ce creşterea pantei pozitive a acestor curbe evidenţiază mărirea stabilităţii, apariţia pantelor negative semnifică existenţa stabilităţii.
Deoarece stabilitatea longitudinală statică nu este suficientă pentru definirea caracteristicilor de apropiere pentru aterizare a oricărui planor – deci şi a Orbiterului – acesta trebuie studiat din punctul de vedere al stabilităţii longitudinale dinamice; în acest scop se consideră apariţia unei perturbaţii, în urma căreia apar oscilaţii ale aparatului de zbor în imediata apropiere a traiectoriei de echilibru, care sunt caracteristice pentru faptul că planorul respectiv a ieşit din zona de stabilitate. Dacă aceste oscilaţii au tendinţa de a se amortiza (şi în final chiar se amortizează), datorită acţiunii momentelor readucătoare de stabilitate (care apar pe ampenajul orizontal), atunci se afirmă că aparatul respectiv posedă stabilitate longitudinală dinamică. Evident, un aparat de zbor se consideră instabil dinamic, în cazul când amintitele oscilaţii în loc să amortizeze în timp real, se amplifică provocând, dacă nu se iau măsurile corespunzătoare, chiar răsturnarea aparatului de zbor.
Piloţii şi constructorii de planoare cunosc din practică, posibilitatea apariţiei unei astfel de instabilităţi la aparatele de zbor având stabilitate statică longitudinală excesivă.
Orbiterul navetei spaţiale având o încărcare alară ridicată, la care se adaugă vitezele şi incidenţele mari pe panta de aterizare, este susceptibil de apariţie a fenomenului de oscilaţii provocate de pilot (OPP); răspunsurile necorelate ale sistemului de comenzi de zbor – în forma iniţială – la acţiunile pilotului, au favorizat amplificarea acestor oscilaţii sau, în orice caz, neatenuarea acestora. Posibilele urmări periculoase ale apariţiei acestui fenomen, implică eliminarea oricărei apariţii a acestuia.
Simularea în sistemul de comandă al navetei a apariţiei, la aterizare, a oscilaţiilor provocate de pilot
Date iniţiale. În perioada 1972-1985, la Centrul de cercetare a zborului Dryden al NASA, au fost efectuate încercări în zbor folosind un avion F-8C, care a fost dotat cu primul sistem de comandă Fly-by-wire digital (DFBW), fără a avea şi un sistem mecanic de rezervă (avarie); decizia de a înlocui toate legăturile mecanice ale comenzilor la eleroane, ampenaje, direcţie etc., a fost luată din două motive: în primul rând pentru a obliga pe cercetători să se concentreze asupra tehnologiei şi a comportamentelor considerate critice, pentru fabricarea unui avion dotat cu sistem “Fly-by-wire”; în al doilea rând, pentru a putea oferi industriei încrederea că ea poate şi trebuie să implice această nouă tehnologie, care este sigură, iar această încredere nu s-ar fi putut obţine dacă sistemul experimental s-ar baza încă pe o rezervă (avarie) mecanică…
 Odată
cu creşterea puterii şi a vitezelor de zbor, cu atât
se cerea amplificatoarelor de forţă disponibilităţi
mai mari, comenzile acţionate hidraulic fiind solicitate în
exces; în timp scurt, toate marile aeronave comerciale şi
cele de performanţă ridicată au fost dotate cu
comenzi de zbor acţionate hidropneumatic şi
electromecanic. Aceste acţionări au impus, însă,
proiectanţilor restricţii referitoare la forma şi
dimensiunile aeronavelor, în special referitor la cerinţele
de stabilitate în timpul evoluţiilor de zbor.
Odată
cu creşterea puterii şi a vitezelor de zbor, cu atât
se cerea amplificatoarelor de forţă disponibilităţi
mai mari, comenzile acţionate hidraulic fiind solicitate în
exces; în timp scurt, toate marile aeronave comerciale şi
cele de performanţă ridicată au fost dotate cu
comenzi de zbor acţionate hidropneumatic şi
electromecanic. Aceste acţionări au impus, însă,
proiectanţilor restricţii referitoare la forma şi
dimensiunile aeronavelor, în special referitor la cerinţele
de stabilitate în timpul evoluţiilor de zbor.
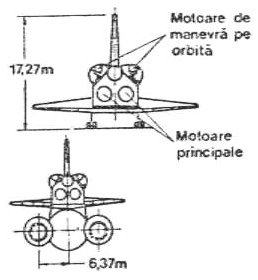
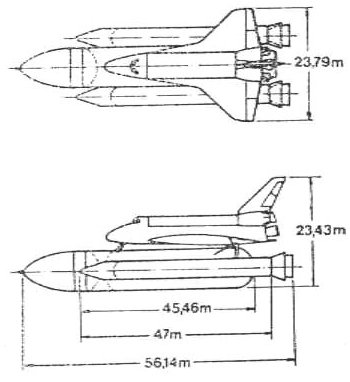
FIG. 2 Schema ansamblului unei navete spaţiale cu principalele cote de gabarit
Orbiter-ul, sau naveta propriu-zisă, este dotat cu o aripă dublu-delta având anvergura de 23,79 m. Lungimea sa este de 37,26 m, înălţimea de 17,27 m, iar masa totală fără sarcina utilă este de 68 t. Sarcina utilă maximă este de 29,5 t şi poate fi amplasată într-un compartiment cu lungimea de 18,28 m şi diametrul de 4,57 m.
Odată cu intrarea, în 1960, în “Era electronicii”, a apărut şi ideea conceperii unui avion care să posede sistemele de comandă a zborului electronizate. Cablajele electrice care au înlocuit agregatele de acţionare (tije, cabluri, actuatoare etc.) hidromecanice, au permis proiectanţilor să aibă o mai mare flexibilitate în alegerea dimensiunilor şi a formelor aparatelor de zbor, inclusiv a amplasării aripilor şi a suprafeţelor de comandă. Un astfel de sistem de acţionare a comenzilor de zbor prin cabluri de transport a comenzilor de zbor prin cabluri de transport a comenzilor electronice, care a primit denumirea prescurtată de “Fly-by-wire” (în traducere liberă “zborul prin fir”), are dimensiuni mult reduse, este mai uşor şi mai fiabil; în cazul aparatelor implicate în acţiuni de luptă aeriană, el este mai puţin vulnerabil. Totodată, avionul dotat cu sistem “Fly-by-wire” este mai prompt în a răspunde la comenzile piloţilor; de aici a rezultat un avion mai eficient, mai sigur şi cu performanţe superioare încă din proiectare.
Avionul F-8 DFBW
La finele deceniului ’60-’70, specialiştii de la Centrul de cercetări Dryden au început analiza modificărilor unui avion spre a-l transforma într-un banc de test zburător al sistemului “Fly-by-wire”. În sprijinul acestei acţiuni, pilotul-astronaut Neil Armstrong (primul pământean pe Selena, 20 iulie 1969), la acea dată în Staff-ul Departamentului pentru cercetări şi tehnologii avansate al NASA şi care cunoştea sistemele electronice de comandă-control a zborului de pe Modulul Lunar, a sugerat folosirea unor componente din tehnica spaţială; el a şi reuşit să transfere de la Marina Militară un aparat F-8C “Crusader”, care la NASA a primit indicativul “NASA 802” (uneori s-a utilizat şi indicativul F-8C DFBW, de la cuvintele în limba engleză “Digital Fly-by-wire”).
Cablajele destinate transportării comenzilor plecau din cabina piloţilor către suprafeţele de comandă etc. ale acestui avion, înlocuind integral vechiul sistem de comenzi mecanice ale aparatului; ca element central a fost instalat un complex de echipamente electronice de la programul APOLLO, format din calculatorul digital pentru conducerea zborului şi un modul de sesizori inerţiali; acest ansamblu reuşea să transforme comenzile pilotului în semnale care erau apoi transmise la actuatoarele electrice care acţionau, la rândul lor, suprafeţe de comandă ale aparatului.
La 2 mai 1972 aparatul F-8C astfel modificat a devenit primul aparat complet dependent de un sistem electronic de comandă a zborului şi care nu mai avea nici un sistem mecanic de rezervă (avarie). El a fost pilotat de Gary Krier.
Prima fază a programului denumit DFBW a condus la omologarea concepţiei sistemului “Fly-by-wire” şi a demonstrat foarte repede că perfecţionarea acestui sistem şi plasarea lui pe aparate de zbor grele, este capabil să amelioreze substanţial calităţile de zbor, prin sesizarea modificărilor mişcărilor aparatului şi mai ales, prin aplicarea instantanee a comenzilor piloţilor.
În Faza I, a fost folosit ca sistem de avarie unul de tip “Fly-by-wire Analogic”, destinat să funcţioneze în caz că computerul de pe APOLLO s-ar fi defectat; acest sistem de rezervă nu a fost folosit niciodată.
În perioada celei de-a II-a Faze a cercetării, într-un program comun cu Centrul Langley al NASA, sistemul original APOLLO a fost înlocuit cu un sistem digital triplu redundant; aceasta urma să fie folosit în calitate de calculator de rezervă dacă ar fi apărut vreo defecţiune.
Derularea programului DFBW a durat 13 luni, ultimul zbor de test, cel de al 210-lea din program, fiind efectuat la 2 aprilie 1985 de pilotul de la Centrul Dryden, Ed. Schneider.
Echipamentul de navigaţie
al Modulului Lunar
Acest echipament complex a inclus Sistemul de navigaţie şi dirijare (PGNS) şi Sistemul de stabilizare şi pilotaj (CES). Primul sistem (PGNS) cuprindea: o platformă inerţială girostabilizată după trei axe; calculatorul de dirijare (LGC), un radiotelescop (AOP) destinat determinării azimutului şi înălţimii stelelor în vederea calculării abaterilor la calarea platformei inerţiale; radar de aterizare pe Lună (LR) cu antenă fixă pe cabină şi antenă-panou, folosit şi pentru măsurători ale parametrilor relativi de mişcare ai navelor în etapa de rendez-vous şi joncţiune; radar de întâlnire pe orbită (RR), utilizabil la distanţe cuprinse între 25 şi 750 km (erori maxime, sub 2 km în distanţă şi sub 0,25% pentru vitezele radiale). Cel de al doilea sistem, CES, utiliza datele furnizate de calculatorul LGC pentru a activa propulsoarele destinate abordării traiectoriei programate; în plus, acest sistem a dispus de încă un computer (ATCA), destinat să elaboreze comenzile de pilotaj. (Există motive să apreciem că acest calculator, cu anexele sale, a fost preluat de specialiştii de la Dryden în vederea dotării avionului-test F-8C DFBW). A existat şi un sistem de dirijare de rezervă cu funcţionare independentă, utilizabil în caz de avarie sau la o eventuală întrerupere a operaţiei de debarcare pe Lună; în ultimul caz, acest calculator de rezervă era programat să elaboreze continuu şi în timp real, programul manevrelor de abordare a orbitei circumlunare pe care evolua (în regim de parcare spaţială) nava APOLLO – evident în condiţiile întreruperii operaţiei de aselenizare – precum şi comenzile corespunzătoare pentru desprinderea etajului ascensional al LEM-ului. (Comunicarea cu staţiile terestre se făceau în banda S pe frecvenţele de 2101,8 MHz la recepţie, respectiv 2282,5 MHz la emisie).
Rezultatele cercetării
Cu avionul F-8 DFBW au fost omologate conceptele de principiu ale sistemului integral electric de zbor, în prezent utilizate de o mare varietate de aparate de zbor, de la F/A-18 la BOEING-777 precum şi de naveta spaţială. Avionul F-8C cu sistem de comenzi DFBW a fost un banc de testare pentru controler-ul manşei folosit pe avionul F-16 de luptă, cel de al doilea aparat militar american de mare performanţă dotat cu sistem DFBW.
Pentru a iniţia introducerea sistemului de comandă a zborului de tip FBW pe navetele spaţiale, aparatul NASA-802 a reprezentat bancul de teste în zbor apt să cerceteze fenomenul oscilaţiilor provocate de pilot (OPP) şi a permis omologarea metodelor destinate să elimine aceste oscilaţii, care apar de regulă atunci când piloţii acţionează “prea ferm” comenzile, rezultând condiţii de apariţie a menţionatelor oscilaţii întreţinute, la care contribuie şi coeficientul ridicat de stabilitate longitudinală statică a aparatului orbital al navetei.
Ultimul din cele cinci zboruri efectuate pentru verificarea comportării aparatului în etapa apropierii şi aterizării, respectiv prototipul Enterprise, în 1977, a evidenţiat apariţia acestui fenomen OPP când naveta era aproape să se aşeze pe pistă. Ca urmare acest aspect a fost reprodus de avionul F-8 DFBW pe care au fost apoi montate mai multe filtre destinate de specialiştii care au implementat sistemul de navetă, să elimine fenomenul OPP.
Rezultatele din final au certificat că studiile privind DFBW efectuate cu aparatul NASA 802 la Centrul de cercetări Dryden, au reprezentat un program foarte eficient şi de succes; ele au fost prezentate fără restricţii abia după anul 1990.